
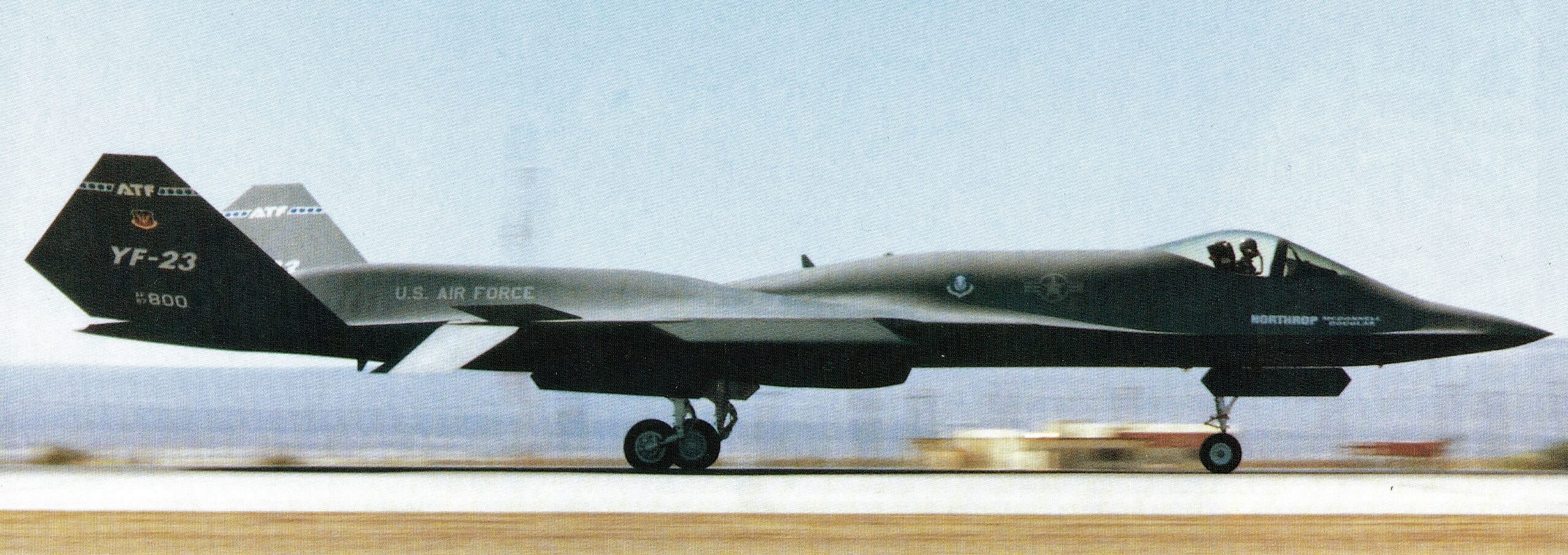
YF-23A, a ‘Viúva Negra’ da Northrop

Os dois protótipos do Northrop-McDonnell Douglas YF-23 em voo
Por Sérgio Santana*
O programa da Força Aérea dos Estados Unidos para um Caça Tático Avançado (ATF) resultou da evolução de uma série de estudos conduzidos na década de 1970 em resposta à mudança do ambiente militar na Europa Oriental e no Oriente Médio.
Começou com ênfase em uma habilidade multifunção com extenso estudo na função de ataque, mas depois que foi demonstrado que o F-15 e o F-16 poderiam ser facilmente adaptados para a função de ataque, um requisito de caça de superioridade aérea puro começou a se materializar. Sob programas separados, o F-15E Strike Eagle foi desenvolvido e colocado em serviço, substituindo o F-111, enquanto o F-117A Nighthawk foi desenvolvido secretamente, aumentando ainda mais a capacidade de ataque da USAF. Com essa necessidade atendida, o foco se estreitou para produzir um substituto direto para o caça de superioridade aérea F-15C/D Eagle.
Assim, em janeiro de 1973 o primeiro documento de requisitos formais foi emitido pelo Comando Tático Aéreo daquela Força Aérea, o ROC 301-73. Nesta fase, mais ênfase foi dada à capacidade multifuncional, uma vez que o papel de caça foi repassado aos F-15 e F-16, que estavam prestes a atingir o status operacional inicial. No mesmo ano, o Laboratório de Dinâmica de Voo da Força Aérea norte-americana iniciou o Programa Avançado de Integração de Tecnologia de Caça (AFTI) usando um F-16 modificado para teste de voo, influenciando os requisitos do ATF.
Três anos depois, dois F-15A Eagle foram adquiridos para uso pelo Dryden Flight Research Center da NASA para numerosos experimentos relacionados ao controle digital das funções da aeronave. Embora o F-16 tenha sido pioneiro com sucesso em um sistema fly-by-wire para controle de voo, o programa ATF levaria o uso do controle digital para o próximo nível, estendendo a tecnologia a todos os sistemas de controle, incluindo a manete de aceleração do motor. Os dois F-15 voaram em vários programas: o de Controle Eletrônico Digital Altamente Integrado (HiDEC), Sistema Adaptativo de Controle de Motor (ADECS), Sistema de Controle de Voo de Auto-Reparação e Autodiagnóstico (SRFCS) e Sistema de Aeronave Controlada por Propulsão (PCA). Os resultados desses testes levaram à especificação de um alto nível de integração na aviônica e na arquitetura de controle planejada para o ATF.
Em 1979 todas essas iniciativas tomaram um impulso considerável porque satélites de reconhecimento americanos detectaram novos protótipos de caças russos em Ramenskoye . Eles receberam o codinome ‘RAM-L’, que se tornaria o MiG-29, e ‘RAM-K’, que se tornaria o Su-27. Julgou-se que essas novas aeronaves eram mais do que páreo para os F-15 e F-16, o que resultou já em abril de 1980 na emissão do documento RQ 7036(4)632330F, a Diretiva de Gerenciamento do Programa para Tecnologia de Aeronaves de Combate, que enfatizava grandemente a maior capacidade de combate aéreo.
Este viés foi acrescido da ideia de incorporar a tecnologia de baixa visibilidade a um possível projeto de caça, que foi levada à discussão pelo influente Instituto Americano de Aeronáutica no ano seguinte, quando a fabricante Northrop (que havia projetado os bombardeiros “asas voadoras” YB-35 e YB-49 décadas antes) publicou um artigo que mostrava como um caça furtivo podia ver seu oponente e atirar primeiro, mesmo que o adversário tivesse um radar mais poderoso e um míssil de maior alcance.
Outro trabalho acadêmico da McDonnell Douglas enfatizou capacidades STOL, stealth e supercruise a serem incorporadas num novo projeto de caça. Como resultado dessas discussões, ainda em 1981, a USAF emitiu um Pedido de Informação provisório ao qual nove empresas responderam: Boeing, Fairchild, General Dynamics, Grumman, Lockheed, McDonnell Douglas, Northrop, Rockwell e Vought. Esta solicitação foi imediatamente seguida de outra, para um sistema de propulsão, que estabeleceu alguns critérios: impulso suficiente para supercruise, capacidade STOL em 1.500 pés de pista, integração da tecnologia stealth, custo reduzido de propriedade e uma capacidade operacional inicial (IOC) em 1993.

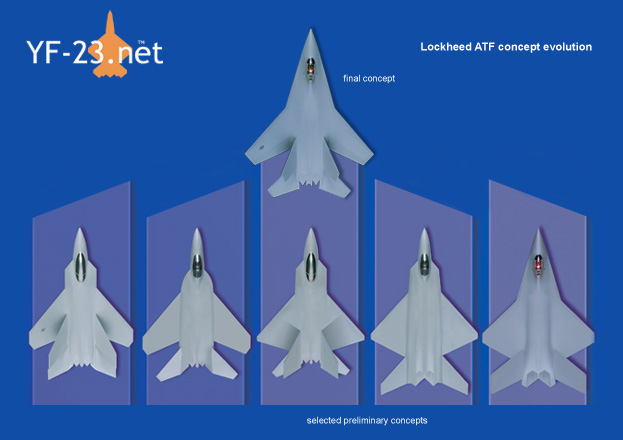
Em novembro de 1981, o programa ATF recebeu o que ficou conhecido como aprovação do ‘Marco Zero’, tornando-se um programa formal de aquisição de armas. Com o progresso do programa, as empresas aeroespaciais começaram a divulgar impressões simplificadas ao público sobre como seria um ATF. Dez meses depois a USAF financiou um RFI definitivo, com as empresas Boeing, General Dynamics, Grumman, Lockheed, McDonnell Douglas, Northrop e Rockwell International tendo recebido, cada uma, contratos de Investigação de Desenvolvimento de Conceito de US$ 1 milhão. Esses fabricantes apresentaram 19 projetos, que variaram de um caça superleve proposto pela Northrop até um peso pesado proposto pela Lockheed. Outra Diretiva de Gerenciamento do Projeto foi lançada, mudando o nome do programa de ‘Combat Aircraft Technology’ para ‘Advanced Tactical Fighter’. Além disso, foi iniciado o Joint Fighter Engine, um programa de demonstração de tecnologia de motores, executado em conjunto com a Marinha norte-americana, com os fabricantes Allison, Garret, Teledyne/CAE, Pratt & Whitney e General Electric disputando o contrato do motor. Os fabricantes GE e P&W venceram esta fase, com contratos de US$ 202 milhões.
Onze meses depois, em uma conferência sobre o programa ATF aberta à imprensa especializada alguns dos requisitos foram detalhados: um caça de superioridade aérea de 50.000 lb, para pousar/ decolar de uma pista danificada por bomba em 2.000 pés, um raio de combate de 700-920 milhas, cruzeiro supersônico sem o uso de pós-combustor, baixa observabilidade por radar ou sensores infravermelhos, e ser mais fácil de apoiar do que um F-15 Eagle. No fim de 1982, o Congresso alocou mais US$ 23 milhões.
No ano seguinte o Escritório do Programa do Sistema ATF subordinado à Divisão de Sistemas Aeronáuticos da USAF foi formado na Base Aérea de Wright Patterson, encarregado de produzir uma especificação abrangente que atendesse aos requisitos essenciais da USAF e ao maior número possível dos requisitos desejáveis, tudo para atingir o objetivo de eliminar o adversário sem ser detectado. Ainda em 1983, Northrop revelou um estudo de conceito conjunto no Paris Airshow feito em parceria com a Dornier na Alemanha desde 1978, o ND-102, um caça leve com asa trapezoidal e sem cauda, mas com empuxo do motor vetorizado, que não estava relacionado ao ATF, mas foi altamente influente nas configurações daquele projeto.

O ano de 1983 viu grandes avanços no projeto ATF: em maio uma solicitação de propostas formal foi emitida para os fabricantes de motores como o contrato Joint Advanced Fighter Engine (JAFE), que incluía um requisito para uma capacidade de alcance de empuxo de 30.000 lb, enquanto outra solicitação seguinte colocou maior ênfase na furtividade. Estes esforços resultaram no recebimento pelos fabricantes GE & P&W de contratos de US$ 550 milhões para construir e testar protótipos estáticos de motores, designados internamente como GE37 e PW5000, respectivamente.
Em 1984 outro grande impulso no programa do ATF: a USAF aprovou uma Declaração de Necessidade Operacional para o ATF. O núcleo desse requisito era atingir níveis sem precedentes de velocidade de cruzeiro sustentada usando queima econômica de combustível e uma redução na detectabilidade por radar da aeronave em comparação com os caças anteriores. A USAF conduziu secretamente vários programas de pesquisa sobre a viabilidade do stealth e colocou em campo uma aeronave de ataque prática, o F-117, por isso estava confiante de que esta tecnologia poderia ser aplicada a um caça de alto desempenho.
Supunha-se na época que o novo caça seria obrigado a operar em pistas danificadas por bombas e precisaria da capacidade de decolar e pousar a uma distância consideravelmente menor do que o comprimento total. Havia a intenção de reduzir o custo crescente da aquisição de caças. O novo requisito previa um caça de 5ª Geração com os seguintes parâmetros: um raio de combate de aproximadamente 800 milhas; cruzeiro supersônico, incluindo a capacidade de navegar a Mach 1,4-1,5 até 300 milhas dentro e fora de território hostil; a capacidade de acelerar de Mach 0,6 a Mach 1 em 20 segundos; a capacidade de acelerar de Mach 0,8 a Mach 1,8 em 50 segundos a 20-30.000 pés; manobra supersônica, incluindo: curva de 2 g sustentada a Mach 1,5 e 50.000 pés; curva de 5 g a Mach 1; curva de 6 g a Mach 1,5 e 30.000 pés; curva de 9 g a Mach 0,9 e 10.000 pés por 30 segundos.
Em termos logísticos e operacionais, o ATF devia ter capacidade de operar a partir de 2.000 pés de pista, compatibilidade com a infraestrutura existente, incluindo hangares reforçados; capacidade de transportar armas ar-ar existentes; ter o dobro da taxa de surtidas do F-15 em mais de 8 missões em 24 horas; tempo de resposta reduzido pela metade para 15 minutos e capacidade de corrigir 75% das falhas em 4 horas; ter aviônicos modulares reconfiguráveis; peso bruto de decolagem de 50.000 libras semelhante ao F-15C Eagle com 8 AAMs e um tanque alijável central. Em resumo, os aviônicos deveriam ser integrados a um nível mais alto do que os caças da geração anterior, os dados do sensor fundido deveriam ser exibidos ao piloto, os reversores de empuxo deveriam ser empregados para aumentar a manobrabilidade em voo e facilitar a exigência da pista, e tinha que ter um assinatura de radar reduzida em comparação com caças de 4ª geração.
Em se tratando de custos, o preço individual do ATF teria de ser limitado a US$ 40 milhões em dólares de 1985 com base em uma produção de 750 aeronaves, o que seria mais caro que o F-15, mas em uma proporção menor em comparação com o incorrido pelo F-15 em relação ao F-4. O custo total do ciclo de vida útil (aeronaves, peças sobressalentes, combustível e horas de trabalho necessárias para voar e manter) comparável ao F-15 e um custo total de programa de US$ 65 bilhões também na cotação daquele ano, que também viu não apenas a fabricação dos primeiros componentes do motor YF119, mas também uma redução formal no limite de custo unitário para US$ 35 milhões e o estabelecimento do envio de propostas formais para abril de 1986, ainda que não houvesse planos para protótipos reais, com a decisão sendo baseada em modelos de túnel de vento e simulações. Antes do fim de 1985, a Força Aérea dos EUA emitiu requisitos furtivos ainda mais rigorosos.
Em março de 1986 A Marinha dos EUA entrou no programa, concordando em usar o ATF como base para substituir o F-14 Tomcat. Em troca, a USAF encontraria um substituto para o F-111 baseado no programa Advanced Tactical Aircraft (ATA) da US Navy. Dois meses depois, a Força Aérea anunciou que encomendaria protótipos de vôo reais de 2 projetos concorrentes para o ATF. A nova fase do programa agora incluiria protótipos de aeronaves, motores e demonstração de protótipos de aviônicos. Isso foi em resposta à Comissão presidida pelo Vice Secretário de Defesa David Packard, convocada em 1984 para revisar as práticas de aquisição do Pentágono, que pregava a doutrina de ‘voar antes de comprar’.
Cada concorrente deveria construir 2 protótipos, cada um para ser propulsado por exemplares dos 2 fabricantes de motores concorrentes. Esta fase incluiria protótipos de voo e protótipos de aviônicos. Apenas 2 contratos seriam selecionados, propostas de custo seriam solicitadas e os fabricantes seriam questionados sobre como adaptariam os resultados da fase para otimizar a redução de riscos dentro do orçamento disponível, para permitir uma avaliação mais precisa das capacidades nas áreas críticas da tecnologia stealth e desempenho básico. Os protótipos não seriam destinados a uma avaliação de voo competitiva direta ou para demonstrar capacidade com cada requisito de desempenho, mas sim para demonstrar que o conceito de cada empresa era fundamentalmente viável.E os contratados teriam flexibilidade aberta para determinar seus respectivos planos de teste de voo.
Em junho de 1986 contratos foram concedidos à Pratt &Whitney e à General Electric para protótipos de motores aptos ao voo, designados YF119-PW-100 e YF120-GE-100 e no mês seguinte seis fabricantes de fuselagem apresentaram seus projetos de protótipo. Em agosto do mesmo ano a USAF assinou um memorando de entendimento com a Lockheed, Boeing, General Dynamics e Northrop/McDonnell Douglas.
No final de outubro de 1986 a Força Aérea dos EUA anunciou que os projetos da Lockheed e da Northrop foram selecionados como os contendores finais para o estágio de Demonstração/Validação, cada um recebendo um contrato de $ 691 milhões. A proposta da Lockheed foi oficialmente chamada de YF-22 pela USAF, enquanto a proposta da Northrop era o modelo N-14, denominado YF-23. US$ 100 milhões foram alocados para sensores de radar e eletro-ópticos e US$ 200 milhões para arquitetura de aviônicos. Um adicional de $ 650 milhões foi concedido a cada empresa de motores. Northrop e McDonnell Douglas chamaram sua parceria de ‘ATF-23 Team’.
Demonstração/Validação
A fase de Demonstração/Validação era para ser um programa abrangente de 4 anos dividido em vários setores: aviônicos, previsão de seção cruzada de radar (RCS), qualidades de voo, facilidade de manutenção e gerenciamento de programas. Tinha três categorias formais:
1) Desenvolvimento de especificação do sistema, que empregava análise de eficácia, análise de design, avaliações de tecnologia e simulação para refinar os requisitos operacionais. Esta categoria cobriu o desenvolvimento e teste de novos materiais de fuselagem, exercícios de simulação de combate e demonstração de técnicas de manutenção. Também incluiu testes e análises de RCS em modelos de escala real e subescala, componentes e modelos digitais de previsão de RCS. Os modelos em escala real que foram construídos tiveram que incluir todos os recursos refletivos de radar e materiais absorventes previstos para os protótipos reais . Os modelos em escala real foram montados em um poste de 70 pés nas instalações da RATSCAT em White Sands, Novo México.
2) Protótipos de Solo de Aviônicos, para demonstrar a praticidade de conjuntos de aviônicos totalmente integrados, fusão de dados de vários sensores em tempo real, uma velocidade de processamento do núcleo do computador 100 vezes mais rápida que os caças da geração anterior, autodiagnóstico e isolamento de falhas e reconfiguração do sistema. Isso seria feito inicialmente em testes de solo, depois no ar. Esta categoria foi um teste de todo o conjunto de sensores, transmissores, processadores e monitores de cockpit para o ATF. Uma exigência inédita foi montar um protótipo completo do sistema aviônico e demonstrá-lo enquanto estava sendo usado por um piloto. A Northrop demonstrou uma antena de radar de varredura eletrônica ativa (AESA), capacidade de detecção e rastreamento de lançamento de míssil de ameaça em todos os aspectos e um sistema IRST.
3) Protótipos de Veículos Aéreos, que serviram para demonstrar as capacidades em que se baseariam as propostas de Desenvolvimento em Escala Total. Cada equipe teve que construir 2 protótipos (conhecidos como PAV-1 e PAV-2) cada um alimentado por exemplares dos motores GE e P&W, resultando em 4 combinações diferentes. O segmento PAV não foi uma comparação no sentido tradicional. O objetivo era permitir que a USAF verificasse o desempenho previsto da aeronave e do motor em relação ao desempenho real demonstrado do PAV. Não foi uma comparação de desempenho de voo, mas uma comparação das habilidades das equipes para prever com precisão as suas respectivas propostas de Desenvolvimento em Escala Total. A ênfase estava na validação. Para tanto, as equipes tiveram certa liberdade para escolher as principais ênfases tecnológicas de seus programas de PAV. O mais importante era demonstrar que uma aeronave furtiva poderia ser um caça ágil, e que velocidade, furtividade e agilidade poderiam ser combinadas em uma aeronave.
Em julho de 1987, a Lockheed determinou que seu projeto era técnica e competitivamente inaceitável, então solicitou uma extensão de 6 meses no prazo de lançamento para fazer as alterações necessárias. Uma nova iniciativa de design foi implantada e após um intenso esforço de 3 meses, uma nova configuração foi desenvolvida. A Northrop ficou fundamentalmente feliz com seu design e nenhuma revisão importante foi feita.
Enquanto isso a Lockheed ‘descongelou’ seu projeto novamente para tentar reduzir ainda mais o arrasto supersônico e apenas no fim do ano seguinte a A USAF anunciou que o requisito de distância de pista que necessitava de reversão de empuxo seria descartado, em resposta aos resultados do programa F-15B S/MTD, mas era tarde demais para afetar a configuração dos motores do PAV e os protótipos das aeronaves voariam com os motores de acordo com o projeto original. Deste modo, em agosto de 1989, foi lançada a Solicitção de Proposta para o Desenvolvimento em Escala Total.


Menos de um ano depois, em junho de 1990, o Northrop YF-23 ATF PAV-1 foi lançado oficialmente na Edwards AFB, à frente da Lockheed. No momento da apresentação, o requisito de peso bruto da aeronave ATF foi reduzido para 55.000 lb, com os testes de voo começando dois meses depois, para ser concluído em novembro do mesmo ano, com o PAV-2.
As propostas finais das empresas foram entregues à USAF. As equipes concorrentes, uma liderada pela Lockheed, fabricante do YF-22, e outra liderada pela Northrop, fabricante do YF-23, enviaram 15.000 páginas de dados cada uma à Força Aérea em um esforço para convencer os funcionários de que o modelo de cada empresa era o melhor candidato para substituir o F-15 Eagle.
Em 23 de abril de 1991, a USAF anuncia sua decisão final sobre qual equipe seguiria para a próxima fase da seleção.

A construção começou quase imediatamente para cumprir os prazos apertados da competição. A Northrop foi a primeira a revelar seu protótipo em uma cerimônia de lançamento realizada na Edwards AFB em 22 de junho de 1990. A Northrop iniciou o funcionamento do motor no mês seguinte e o YF-23 foi movido pela primeira vez em 7 de julho, com testes de táxi em velocidades crescentes, culminando no teste final de alta velocidade a 120 nós em 11 de agosto daquele ano.
Apelidado não oficialmente de ‘Viúva Negra II’, o Protótipo de Veículo Aéreo (PAV) número 1 da Northrop decolou pela primeira vez em 27 de agosto, fazendo um voo quase perfeito de uma hora. A subida foi rápida, forçando o F-16 “paquera” a usar pós-combustão para permanecer com o YF-23 usando empuxo militar (sem pós-combustão). O piloto de teste da Northrop, Paul Metz, afirmou que a aeronave era anormalmente “sólida”, mas ágil, necessitava poucos movimentos do manche do piloto para permanecer em formação apertada com aquele F-16. A Lockheed revelou seu protótipo YF-22 no dia seguinte em uma cerimônia realizada na Planta 10 em Palmdale, CA em 28 de agosto.
Com o primeiro voo concluído, o volume de testes de voo aumentou rapidamente. A fim de maximizar o tempo de voo, o YF-23 se qualificou para reabastecimento aéreo em seu quarto voo. Voando atrás de um navio-tanque KC-135, o YF-23 passou quase três horas realizando conexões e desconexões em várias velocidades e em todo o envelope do receptáculo do reabastecedor. O vôo número 5 viu o YF-23 voar supersônico pela primeira vez sob o controle do piloto de testes da McDonnell Douglas, Bill Lowe. Posteriormente, o avião começou a testar velocidades de supercruzeiro Mach número 1,5 e até no voo número seis, os primeiros quatro pilotos do YF-23 receberam check-out com a verificação final do piloto vindo com o piloto de teste operacional do programa, Com Thueson, no voo número 11.

O PAV-2 ingressou no programa de voo em 26 de outubro de 1990, com Jim Sandberg levando o avião movido pelo motor GE em seu primeiro voo. Os voos progrediram rapidamente com o PAV-1 indo bem até 30 de outubro, quando Bill Lowe experimentou um rompimento do pára-brisa dianteiro a Mach 1,5 durante o voo número 16. A camada externa de vidro do pára-brisa rachou mas a camada interna de policarbonato ficou intacta, permitindo um pouso seguro. O mesmo cenário se repetiu no PAV-2 quase um mês depois.
Os primeiros voos no PAV-2 foram problemáticos. Seu segundo voo foi encurtado quando o motor esquerdo entrou em uma condição de sub-marcha lenta e não acelerou e o avião fez um pouso monomotor sem intercorrências. O voo número 3 em 21 de novembro quase viu o fim do PAV-2 quando uma linha de detecção de ar obstruída causou a superpressurização dos tanques de combustível. À medida que a aeronave subia em altitude, as pressões internas atingiam os limites dos tanques de combustível. A ação rápida da sala de controle de solo ajudou a colocar a aeronave no solo antes que ocorressem danos graves à fuselagem. Com esses incidentes para trás, o PAV-2 se estabeleceu e se tornou uma aeronave de teste confiável.
Ambos os veículos aéreos agora retornaram excelentes dados de desempenho nas fuselagens, aviônicos e motores. Os dois protótipos de veículos aéreos voaram juntos apenas uma vez durante o programa de testes, quando Paul Metz no PAV-1 e Jim Sandberg no PAV-2 voaram em formação sobre o deserto de Mojave em 29 de novembro. O PAV-1 encerrou sua carreira de testes de voo no dia seguinte com um teste de oscilação e flutuação de seis voos para Mach 1,8, a maior velocidade alcançada pelo PAV-1. O programa de testes de voo do PAV-1 durou apenas 93 dias.

Com o PAV-1 aposentado, todos os esforços foram concentrados na expansão do envelope do supercruzeiro com o PAV-2. A velocidade máxima de supercruzeiro com o PAV-2 nunca foi divulgada publicamente, mas afirma-se que foi significativamente mais rápida que o PAV-1. Com o financiamento se esgotando, o PAV-2 continuou os testes de voo. No penúltimo voo do PAV-2 em 18 de dezembro, ocorreu uma formação de 15 minutos com o primeiro YF-22. O voo final do programa ocorreu durante o segundo voo naquele mesmo dia, quando Ron ‘Taco’ Johnston levou o PAV-2 para uma missão de teste de quase 2 horas. Os testes de voo do PAV-2 duraram apenas 82 dias.
Ambas as aeronaves foram colocadas em um armazenamento aguardando a decisão sobre o vencedor do programa ATF. O PAV-1 moveu-se sob potência apenas mais três vezes em janeiro, fevereiro e março de 1991 durante corridas de táxi em baixa velocidade para manter a aeronave em condições de voo.

A Força Aérea passou os primeiros quatro meses de 1991 avaliando as duas propostas de estrutura e motor. Em 23 de abril de 1991, o secretário da Força Aérea, Donald Rice, anunciou que o Lockheed F-22 e o Pratt & Whitney F119 ganharam a competição para o contrato de produção do ATF. O secretário Rice afirmou que ambas as aeronaves atendiam aos requisitos do ATF, mas a USAF tinha mais confiança na Lockheed e na Pratt & Whitney para “gerenciar” o programa e entregar o sistema de armas no prazo e ao custo esperados.
Após a decisão do ATF, ambos os PAVs, despojados de todos os equipamentos fornecidos pelo governo, incluindo aviônicos e motores utilizáveis, foram colocados em armazenamento externo em uma pequena área cercada próxima às instalações de teste B-2 na Edwards AFB. Depois de quase dois anos, a propriedade de ambos os PAVs foi firmada para a NASA em 1º de dezembro de 1993. Dezoito meses depois de receber os YF-23, a NASA ouviu que nenhum teste seria feito e que os aviões seriam doados a museus.
A propriedade do PAV-1 foi para o Museu Nacional da Força Aérea dos Estados Unidos e o veículo foi transferido para o Museu do Centro de Testes de Voo da Força Aérea na Base Aérea de Edwards em maio de 1995 para exibição temporária. Em agosto daquele anos, o PAV-2 foi desmontado e transportado para o Western Museum of Flight originalmente localizado em Hawthorne, California, mas posteriormente transferido para Torrance, CA. Em 2000, o PAV-1, desmontado e transportado via C-5 Galaxy, foi para o Museu Nacional da Força Aérea dos Estados Unidos em Dayton, Ohio, onde está atualmente em exibição.

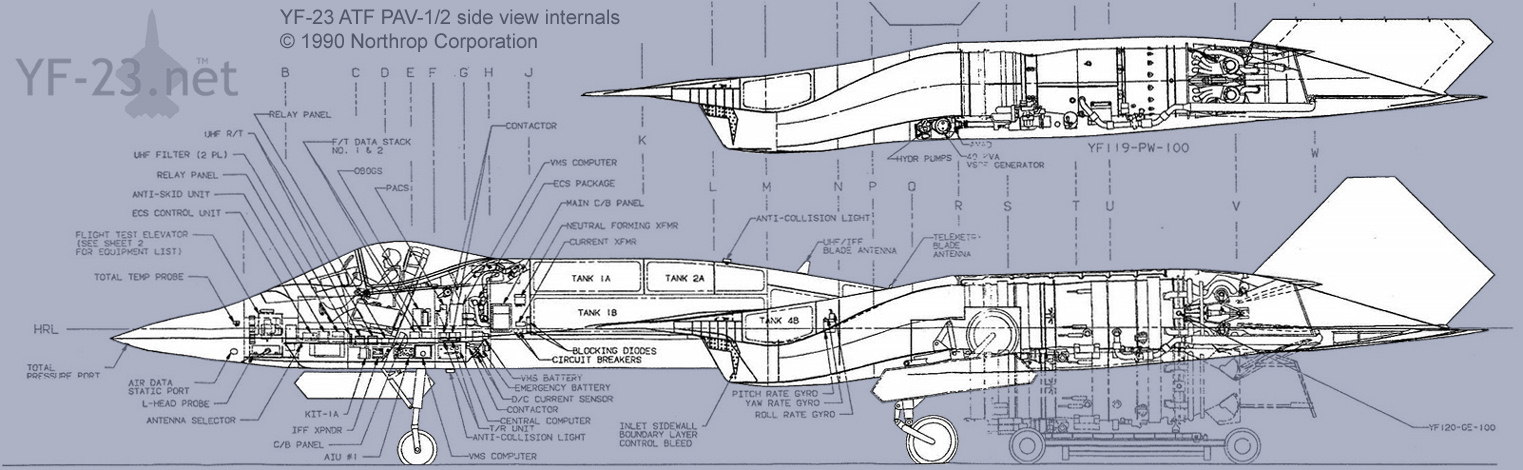
Detalhes Técnicos
Configuração
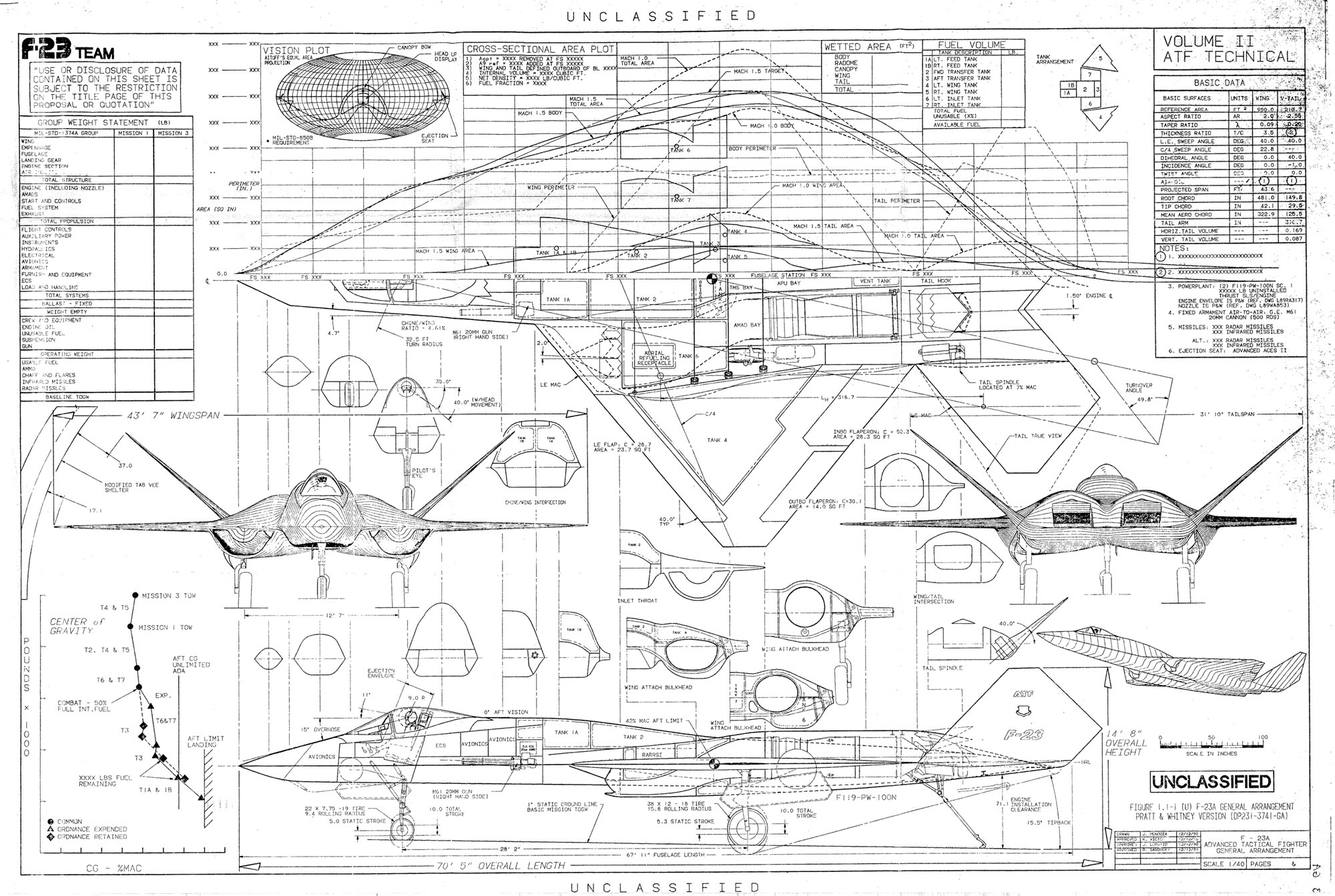
A forma geral foi cuidadosamente projetada para atender o máximo possível à velocidade e furtividade em todos os aspectos, oferecendo agilidade confiável e voos em altos ângulos alfa. Era uma configuração triolítica com uma asa trapezoidal em forma de diamante, um ‘V’ ou cauda de borboleta, e conformava-se firmemente com a Regra da Área na forma e distribuição de seu volume. O design consistia em vincos ou bordas completamente retas alinhadas em 7 direções (6 angulares e 1 longitudinal) para minimizar os picos de retorno do radar tanto quanto possível.
Todas as bordas eram paralelas a um desses 7 alinhamentos. O ângulo primário de alinhamento foi de 40°. Os cantos de 90° e as superfícies verticais foram reduzidas ao mínimo. A forma geral empregou uma série de superfícies planas ou facetas suavemente misturadas ou chanfradas em três massas essenciais com curvas fluidas. As laterais da aeronave também se ajustavam o mais próximo possível a quatro alinhamentos angulares diferentes quando vistos de frente ou de trás. A configuração pode ser essencialmente pensada como uma grande asa de diamante cortada à qual três massas volumétricas foram anexadas.
As duas massas traseiras consistem nas naceles do motor e entradas de ar e abrigam o trem de pouso principal, enquanto a massa frontal é a parte frontal ou fuselagem contendo o compartimento de armas, cockpit, aviônicos e trem de pouso dianteiro. A fuselagem foi reduzida em volume quase precisamente no ponto de envergadura máxima da asa. O ângulo de varredura dos bordos de ataque e fuga das superfícies voadoras era de 40°. As fendas entre as superfícies de controle nas asas eram verticais. O bordo de ataque era arredondado, enquanto o bordo de fuga era afiado. A cauda em V oferecia proteção IR significativa do escapamento do jato traseiro. Foi inclinado para fora em um ângulo com 40° de diedro.
O bordo de ataque da cauda em V começava precisamente onde terminava o movimento da asa. A conformidade com a regra da área foi provavelmente a mais rigorosa em todas as aeronaves. A forma geral se assemelharia mais a uma arraia e é amplamente considerada uma das aeronaves mais bonitas que já voou. É o único caça supersônico a empregar uma cauda em V, o único caça no mundo a empregar uma forma de asa de diamante completamente simétrica e foi possivelmente (no caso do PAV-2) a aeronave mais rápida do mundo em relação ao supercruise.
Construção
Os materiais estruturais primários foram carbono/bismaleimida e titânio. A carga da asa principal foi distribuída entre 4 longarinas primárias. As paredes de fogo, estruturas de suporte do motor, mastros das asas e estruturas de fixação eram de liga de titânio. O trem de pouso era de aço. O nariz era feito de alumínio e não tinha radar ou sensores. O canopi era feito de policarbonato e as placas de exaustão na parte traseira eram feitas de titânio Lamilloy .
Gerenciamento Central
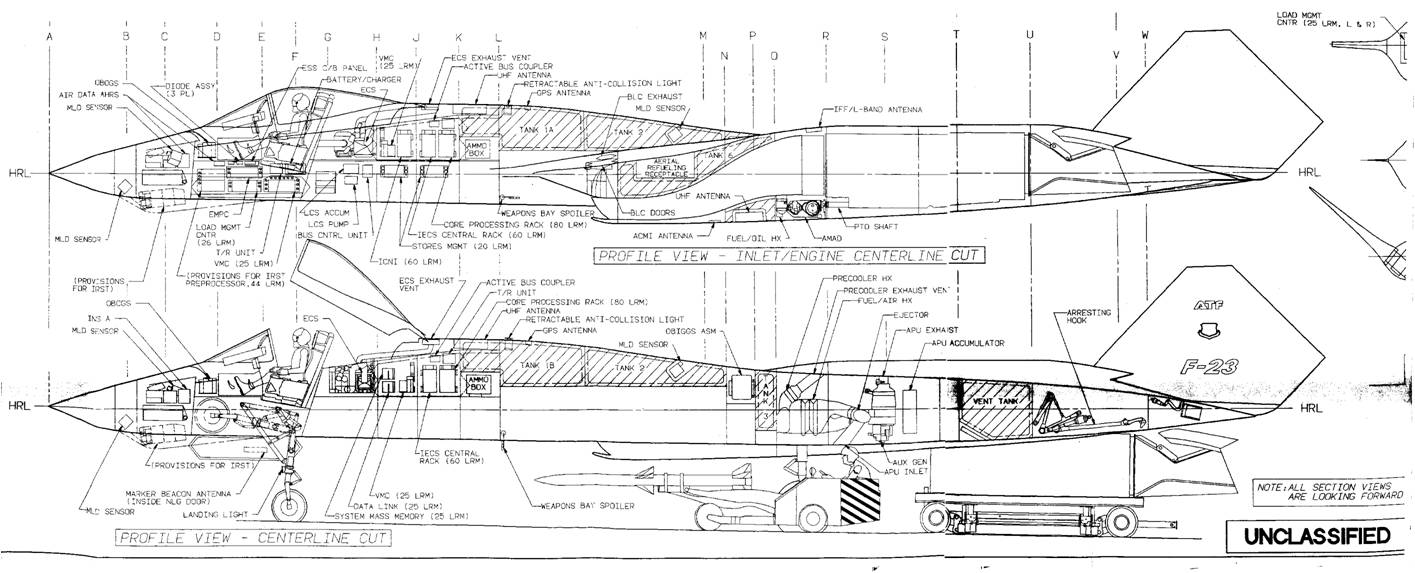
O coração da aeronave era o Sistema de Gerenciamento de Veículo, projetado para monitorar e aceitar feedback de todos os sistemas a bordo da aeronave e fornecer as informações de controle necessárias. Ele integrava todas as funções em um único organismo, permitindo um nível muito maior de resposta dinâmica com maior eficiência do que um sistema convencional. Permitiu a integração completa de sistemas normalmente díspares: controlava o movimento da superfície de controle de voo, operação do motor, posição da porta de controle da camada limite, direção da roda do nariz, antiderrapagem das rodas e dados aéreos/dados de teste de voo relacionados às superfícies de voo. O seu núcleo era o banco de Computadores de Gerenciamento de Veículo: 4 computadores conectados alimentando um sistema de controle totalmente digital para redundância quádrupla.
Controle Aerodinâmico
O YF-23 era uma aeronave altamente instável aerodinamicamente para permitir a máxima agilidade em vôo. Foi estabilizado artificialmente pelo seu sistema de gerenciamento. A aeronave empregava uma série de superfícies de controle aerodinâmico totalmente integradas àquele sistema, o que significa que qualquer superfície poderia ser usada para qualquer tarefa de controle, e a manobra era realizada movendo todas as superfícies em conjunto para obter um resultado, em vez do método tradicional de ter uma superfície de controle dedicada para uma tarefa específica. Por exemplo, os flaps de bordo de ataque podiam ser usados de forma diferenciada, para rolar a aeronave em conjunto com outras superfícies; em conjunto, para fornecer sustentação para pouso e decolagem ou manobra de alto ângulo de ataque, ou para atuar o elevador e frear a aeronave na rolagem de pouso.
Uma superfície de controle pode executar pelo menos 3 funções ao mesmo tempo: fornecer vetores de controle de manobra, cancelar efeitos fora do eixo indesejados de outras superfícies (por exemplo, entrada de guinada das caudas em V quando a inclinação for necessária) e manter a estabilidade de voo constante. Como consequência, a aeronave não tinha freio aerodinâmico separado. A frenagem foi fornecida pela deflexão dos flaperons da asa do bordo de fuga. Os flaperons principais internos podiam ser desviados fortemente para baixo, enquanto os flaperons secundários externos seriam desviados fortemente para cima, ou vice-versa. Em termos de tarefas específicas de entrada de controle: o controle de guinada era controlado pelas caudas em V (os flaps das asas no bordo de fuga compensavam o rolamento causado pela cauda em V). O controle de rolagem controlado pela deflexão diferencial dos flaperons. O de arfagem era controlado pela deflexão da cauda em V. O sistema de gerenciamento mantinha deslizamento lateral zero, a menos que comandado de outra forma pelo piloto.
Para fornecer feedback ao sistema de gerenciamento, o nariz da aeronave apresentava sensores de pressão de ar nivelado com tubos pitot não estanques para backup. As portas estáticas de ângulo de ataque eram localizadas na parte superior e inferior na linha central do nariz. A pressão diferencial registrada pelas portas fornecia informações sobre o ângulo de ataque. As portas estáticas de deslizamento lateral estavam localizadas no deslocamento do nariz para a linha central. A pressão diferencial fornecia o ângulo de deslizamento lateral. A pressão combinada de ambos os lados fornecia pressão estática para cálculo de velocidade e altitude. Dois tubos pitot em forma de L na parte inferior da fuselagem atrás do nariz forneciam medições de pressão total para computação de backup de velocidade no ar. Uma verificação da calibração dos dados aéreos era iniciada pelo sistema de gerenciamento na decolagem a aproximadamente 45 nós, comparando a velocidade no ar, o giro das rodas e a velocidade do sistema inercial.
Compartimento de armas

O compartimento de armas era um único compartimento situado atrás da cabine. Tinha acabamento em primer de cromato de zinco no PAV-1, branco brilhante no PAV-2 e continha encanamento visível nas paredes internas. A baía tinha 160 polegadas de comprimento. O projeto foi configurado provisoriamente para transportar 3 AIM-120A AMRAAMs e 2 AIM-9 Sidewinders. Os mísseis deveriam ser presos a um único ‘palete’ plano que girava para baixo e para frente em atuadores hidráulicos para ficar nivelado com a parte inferior da fuselagem para o lançamento de armas. Os lançadores dos AMRAAMs foram inclinados para fora em 17° para facilitar a ejeção positiva para fora e para baixo. Os mísseis seriam anexados a adaptadores LAU-106 e alinhados 4,5° com o nariz para baixo quando lançados. Pequenos defletores brancos balançaram na corrente de ar ao mesmo tempo em que as portas do compartimento de armas se abriram, para estabilizar o fluxo de ar ao redor dos mísseis, garantindo uma separação segura e clara no lançamento.
As portas do compartimento de armas eram unidades de peça única relativamente grandes e se abriam para ficarem inclinadas em um ângulo semelhante aos lados das entradas de ar, protegendo efetivamente as entradas da exaustão de mísseis no lançamento. As portas tinham superfícies internas relativamente lisas compatíveis com os testes acústicos do compartimento de armas. Eles foram equipados para montar potencialmente um Sidewinder lançado por trilho, cada um usando um adaptador LAU-114. No PAV-2, as portas eram brancas e tinham nervuras estruturais expostas no interior, em vez de superfícies lisas. Esta aeronave foi programada para outras tarefas além da medição acústica do compartimento de armas.
As portas do PAV-1 podiam operar em 3 modos: lançamento rápido, em que as portas abriam em 2,1 segundos; lançamento padrão em que as portas se abriram em 5 segundos; ou modo lento onde abriram em 10 segundos. Este era o modo padrão para operações terrestres para garantir a segurança da equipe de solo. Os protótipos voaram em uma configuração básica; a integração de armas foi planejada para um estágio posterior caso a Northrop tivesse vencido o contrato da fase seguinte. Demonstrações de lançamento de armas foram simuladas usando modelagem de computador. Foi feita provisão para um canhão GE M61 Vulcan de 20 mm com 500 cartuchos na raiz da asa de estibordo. O acesso à munição era feito por uma escotilha de acesso localizada na parte inferior do ar condicionado. Mais uma vez, a arma não foi realmente carregada. O espaço reservado para munição foi ocupado por equipamentos de teste.
Cockpit
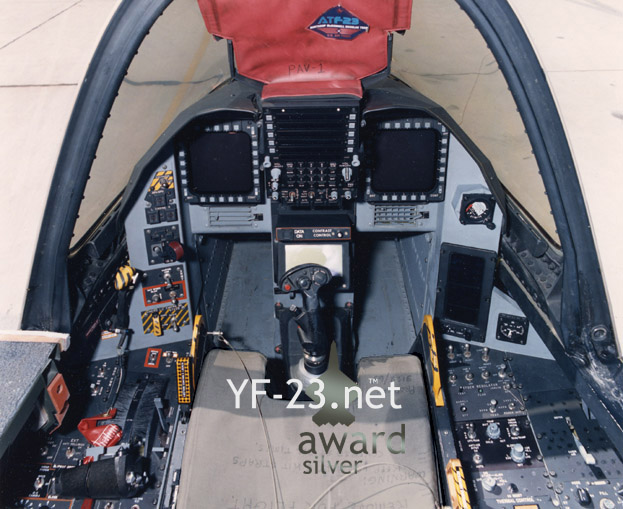
O cockpit tinha um layout único, mas não incluía nenhum novo equipamento projetado especificamente para o programa ATF. Todo o hardware do cockpit estava pronto para uso. O painel de instrumentos usava unidades de exibição do F-15E, mas tinha um arranjo geral diferente. Embora o layout do painel dos CRTs principais fosse semelhante ao do F-15E, o painel estava desprovido do cluster de luz de advertência encontrado no lado direito do painel do F-15E e no lugar dos clusters de medidores analógicos encontrados diretamente sob os principais CRTs esquerdo e direito do F-15E, havia aberturas de ar condicionado simples. Havia um mínimo absoluto de instrumentação analógica no YF-23, apenas um indicador de atitude de espera e altímetro do cockpit na extrema direita do painel de instrumentos. O painel incluía uma única e nova unidade longitudinal de exibição de diagnóstico/advertência do tipo CRT à direita. O HUD era idêntico ao F-15E. O layout do console lateral era exclusivo da aeronave, embora a switchologia da cabine fosse semelhante à do F-15E.
Os consoles apresentavam equipamentos de teste normalmente não encontrados em uma aeronave de produção. A aeronave ostentava um assento ACES II padrão com acabamento em preto, em vez do cinza usual. O assento foi reclinado para trás em 18°. Suportes vermelhos (para montar as câmeras de vídeo de monitoramento de vôo) foram instalados nos trilhos de ejeção do assento, embora o PAV-2 tivesse um suporte ligeiramente mais robusto no trilho esquerdo do assento de ejeção. O equipamento de regulação da pressão da cabine se destaca imediatamente atrás do assento. O piloto conseguia ver por cima do nariz em um ângulo de depressão de 15°.
A estrutura do canopi foi finalizada em primer de cromato de zinco, exceto nas áreas visíveis para cima da estrutura dentro da área do cockpit real, que foram finalizadas em preto fosco. Em vez de ter fileiras de ganchos de travamento, ele apresentava dois ganchos em forma de dente de tubarão muito grandes na parte traseira. A estrutura do cockpit montava dois espelhos e um par de alças. O peitoril da cabine apresentava rótulos “experimentais” proeminentes em ambos os lados. O joystick foi montado no centro. O quadrante de manetes de aceleração também foi emprestado do F-15E. No PAV-2, o suporte do quadrante do acelerador foi deixado em primer de cromato de zinco. O diagrama do manual do piloto do layout do painel de instrumentos mostra 2 medidores de rotação: eles não foram instalados na aeronave real porque os testes de rotação não foram realizados.
Aviônicos e Sistemas

Além do Sistema de Gerenciamento, a aeronave possuía os seguintes aviônicos e sistemas a bordo: uma Unidade de Potência Auxiliar Garret Auxiliary Power Unit (APU), que fornecia ar pressurizado para a partida do motor no solo; um Gerador de Oxigênio Litton de um AV-8B Harrier; um radio de transmissão segura em UHF KY-58; antenas UHF, sinalizadores de banda C, sinalizadores de banda L; e IFF, INS, TACAN e um Sistema de Controle Ambiental, que fornecia ar condicionado para pressurização e ar condicionado do cockpit, desembaçamento do para-brisa, vedação do canopy, anti-g, pressurização do tanque de combustível, geração de oxigênio e resfriamento dos aviônicos.
Era alimentado por ar de sangria do motor, APU ou carrinho de solo, conforme necessário. A pressurização do cockpit era automática, a pressão ambiente era equivalente a 8.000 pés até 23.000 pés de altitude real; depois disso, 5 psi de diferencial para a pressão externa. Em nenhum momento nenhuma das aeronaves carregou um radar ou sensores de combate. No PAV-1, o ECS estava localizado no cockpit imediatamente à frente da antepara traseira, abaixo da linha do velame. No PAV-2, estava localizado na seção dianteira do compartimento de armas.
Acessos de manutenção
As portas de acesso do compartimento do motor e do compartimento de aviônicos eram revistidas de primer de cromato de zinco nas superfícies internas. As portas do compartimento do motor articulavam-se para baixo e para dentro. As portas do compartimento de aviônicos tinham fechos de liberação rápida e eram completamente removíveis. Havia um rack de aviônicos montado logo à frente da cabine que deslizava verticalmente em trilhos duplos embaixo da aeronave para acesso de manutenção. Enquanto os painéis principais tinham alinhamento apropriado com um dos 7 eixos, muitos painéis na aeronave tinham formato de ângulo reto.
Trem de pouso

A aeronave empregava a configuração padrão do trem de pouso triciclo. As pernas principais eram unidades em balanço de eixo traseiro exclusivas da aeronave, com rodas principais do F-18. As unidades traseiras retraíam-se para trás e diretamente para cima no corpo sem qualquer giro da roda, e a unidade frontal girada para cima e para a frente na direção fuselagem dianteira, novamente, sem nenhum giro da roda. O suporte dianteiro era uma unidade F-15 simplificada com diferentes suportes dianteiros e a adição de um braço traseiro para combater as tendências de oscilação.
O deslocamento do amortecedor foi reduzido para atender aos requisitos de altura da fuselagem do YF-23, que fica mais baixo do que o F-15. As unidades de trem de pouso dianteiro e traseiro empregavam portas únicas, respectivamente, em contraste novamente com os caças da série adolescente, que têm várias portas por unidade. A porta dianteira da engrenagem abria e retraia com extrema rapidez. A retração do trem de pouso era de 4,5 segundos, a extensão era de 7 segundos e a extensão de emergência podia ser realizada em cerca de 25 a 35 segundos. A direção da roda do nariz era de 20° acima de 15 nós, até 45° abaixo de 15 nós.
Motores

Os PAVs voaram usando motores equipados com bicos que foram configurados para operações STOL de acordo com o requisito original do ATF. Esse recurso não foi realmente testado devido à redundância do requisito. O bocal desenvolvido para o YF-23 tinha um design bidimensional muito simples. O P&W YF119 empregava uma cobertura externa móvel, enquanto o GE YF120 tinha uma cobertura fixa. O combustível era armazenado em 11 tanques de combustível distribuídos pelas asas e fuselagem: 1 em cada asa, 1 acima de cada admissão, 4 ao redor do compartimento de armas e os demais tanques na fuselagem central.
Exaustores

As calhas de exaustão do jato foram revestidas com ladrilhos de metal Titanium Lamilloy em forma de quadrado de 5×5 polegadas de área, colocados em uma matriz em ângulo reto no fundo da calha e nas paredes laterais, alinhados com a borda superior inclinada para baixo da calha. Alguns dos ladrilhos tinham uma forma trapezoidal onde a inclinação encontrava o chão, e os ladrilhos extremos da borda posterior tinham a forma de paralelogramos. As telhas trabalharam com o princípio de resfriamento por transpiração e protegeram a estrutura de fibra de carbono abaixo do calor excessivo. As calhas eram resfriadas com ar sangrado dos motores, que descia por 3 tubos, um para cada parede e outro para o ‘chão’ da calha, saindo por uma série de orifícios muito pequenos sob a extremidade traseira da parte inferior das calhas. A borda traseira extrema da fuselagem traseira e das calhas do jato era rombuda ou arredondada. O design geral da seção traseira foi otimizado para minimizar a assinatura IR da vista lateral traseira inferior.
Interface do motor
A interface do computador entre os computadores do sistema de gerenciamento da aeronave e os Controles Eletrônicos Digitais de Autoridade Total (FADEC) montados no motor forneciam o controle de empuxo do motor. O FADEC incluía monitoramento em voo do desempenho do motor e relatórios de manutenção pós-voo. Os computadores de gerenciamento passavam comandos de Mach e empuxo para o FADEC. O FADEC passava os dados de empuxo alcançado, status do motor e desempenho do motor de volta para os computadores de gerenciamento. O FADEC ajustava a velocidade e a pressão do motor para fornecer uma operação estável e sem estol do compressor durante todo o envelope de voo.
Ele controlava o fluxo de combustível do queimador principal e pós-combustor, ignição do queimador principal e pós-combustor, ângulos variáveis das palhetas do ventilador e do compressor (para o YF119), ângulo variável das palhetas do estator e área de derivação variável (para o YF120) e o bocal de exaustão e áreas de saída. Combustível pressurizado foi usado para fluido hidráulico do motor e resfriamento do óleo lubrificante. Um modo de motor integrado fornecia controle de velocidade (equivalente ao controle de cruzeiro). Outro sistema, o Computador de Gerenciamento e Transferência de Combustível controlava o CG da aeronave.
Entrada de Ar
Os motores usavam entradas de ar de geometria fixa muito simples, suspensas, que serpenteavam para dentro e para cima a partir do bordo de ataque da asa. A geometria de admissão foi otimizada para fornecer as ondas de choque necessárias para desacelerar o ar do motor para velocidade subsônica (ao voar em velocidade supersônica) sem o uso de rampas de geometria variável. O choque térmico e a turbulência de ar associada na face do motor foram evitados pelo sangramento da camada limite. A extração de ar da camada limite nas entradas de ar foi realizada por um grande painel finamente perfurado localizado no teto da entrada.
Havia um painel secundário orientado verticalmente localizado no interior da parede interna da entrada, alinhado com a parte traseira do painel principal. Este excesso de ar era canalizado através de 2 portas de saída e uma saída embutida localizada no topo da asa. O Sistema de Controle da Camada Limite controlava o choque térmico e a interação da camada limite na rampa de entrada do motor durante o vôo supersônico. As portas de saída eram controladas automaticamente pelo sistema de gerenciamento, mas havia opção manual para o piloto. A curva das entradas de ar eram suficientes para impedir que as pás do ventilador do motor fossem detectadas pelo radar diretamente à frente, mas havia um ponto de acesso onde as pás podiam ser detectadas na linha de visão em um ângulo vetorial aproximado de 18° para fora e 13° para baixo . Em todos os outros vetores, as pás do ventilador foram mascaradas.
Características do ATF YF-23
- Motores: 2 Pratt & Whitney YF119-PW-100 (PW5000) ou 2 General Electric YF120-GE-100 (GE37)
- Velocidade: em regime de supercruzeiro registrada Mach 1.43 indo a mais de Mach 1.6, com o número real permanecendo secreto
- Peso vazio: 35.000-50.000 lb
- Peso máximo: 44.000-60.000 lb
- Combustível: 18.000 lb
- Comprimento: 67’6″/ 67,4 pés
- Envergadura da asa: 43′ 7″ / 43,6 pés
- Envergadura da cauda: 34′ 2″
- Altura: 13,9 pés
- Compartimento de armas: 160 pol./ 13,33 pés de comprimento x 48 pol. de largura x 38 pol. de altura
Estimativas de desempenho segundo o NTM 1F-23(Y)A-1 Utility Flight Manual
As características de desempenho máximo de voo são classificadas e de interesse apenas acadêmico, uma vez que a aeronave não foi testada em seus limites máximos, apenas aqueles suficientes para demonstrar os requisitos da USAF dentro da estrutura de avaliação. Os parâmetros de voo reais necessários para serem demonstrados eram muito mais baixos do que o que a aeronave era teoricamente capaz. Os números de desempenho nunca foram divulgados publicamente , portanto, todos os números de domínio público são estimativas.
- Velocidade máxima: em alta altitude Mach 1.8+
- Velocidade máxima em baixa altitude: 915 mph estimado
- Velocidade de supercruise: Mach 1.6+ valor declarado publicamente, a velocidade real é classificada
- Velocidade mínima: 140 KCAS
- AoA para rampa de planeio: 10°
- AoA na aterrissagem: 12,5°
- AoA máximo testado: 25°
- AoA máximo teórico: 55°
- Raio de combate: com combustível interno cheio e peso equivalente ao complemento AAM completo, 800-900 milhas
- Teto de serviço: 50.000 pés testado, 60.000 pés
Provisões de Armas (capacidade apenas provisória, as armas não foram transportadas):
- 3 Adaptadores de lançamento LAU-106 para AIM-120A AMRAAM, 4,5° para baixo no lançamento
- 2 adaptador de lançamento LAU-114 para AIM-9L Sidewinder
- 1 canhão GE M61A1 Vulcan de 20 mm com 500 munições






*Bacharel em Ciências Aeronáuticas (Universidade do Sul de Santa Catarina – UNISUL), pós-graduado em Engenharia de Manutenção Aeronáutica (Pontifícia Universidade Católica de Minas Gerais – PUC/MG). Colaborador de Conteúdo da Shephard Media. Colaborador das publicações Air Forces Monthly, Combat Aircraft e Aviation News. Autor e co-autor de livros sobre aeronaves de Vigilância/Reconhecimento/Inteligência, navios militares, helicópteros de combate e operações aéreas



YF-23, F-20, CF-105… Quanta coisa boa que nunca veremos voando. O inferno deve ter um lugar especial reservado para todos aqueles gestores que assassinaram belos projetos.
O YF-23 não foi “assassinado”, o concorrente simplesmente se mostrou mais adequado para o que a USAF estava buscando. A Northrop também estava mal das pernas e os militares não sentiram muita confiança na gestão do projeto por parte deles.
Não parece estranho que seja sempre a Lockheed que tenha o “projeto melhor”? O F-104 deles também ganhou a concorrência sobre outros fabricantes além da Northrop e o tempo provou que o caça não era tudo isso. Alias, só foi um “sucesso” na Otan por conta de suborno. A Northrop foi injustiçada por diversas vezes. Seu YF-17 Cobra foi considerado ruim, no entanto sua base serviu para o F-18. Seu F-20 poderia ter sido uma alternativa para quem não tinha acesso ao F-16, mas faltou boa vontade da parte de alguns. Nem sempre o melhor projeto é o escolhido. O… Read more »
Quanto ao f15 ser muito superior ao f14 depende da missão que a ele era confiada , a us navy estava a procura um caça pra defesa da frota contra os bombardeiros TU22 e seus misseis anti navio ,e neste aspecto nada era melhor que o conjunto F14/AW9 /misseis phenix acho eu,alem do que veio um pouco antes do f15 e desde o inicio concebido como caça naval ,já o f15 não
“A quantidade e a qualidade das ideias rejeitadas é provavelmente a melhor medida da capacidade criativa de uma pessoa”.
(BAXTER, Mike. Projeto de Produto: guia prático para o design de novos produtos. Trad. Itiro Iida. 3. ed. São Paulo: Blucher, 2011. p.22)
Certamente estes projetos demonstram isso.
mas o YF-23 de longe é a maior “perda”.
Excelente matéria, parabéns ao autor. Inclusive estou gostando de ver mais matérias assim na trilogia, como as das aeronaves da SAAB.
O YF-23 tem uma beleza alienígena e nos dá a impressão que seria um caça ainda melhor e mais furtivo que o F-22, porém deveria ser ainda mais caro que o Raptor e carregar menos armas, acredito que o fim da URSS pesou bastante na escolha.
Um F/A-23 (versão caça-bombardeiro) para substituir o F-15E seria especialmente letal.
Parabéns, Sérgio Santana. Matéria incrível.
Uma aeronave que estava à frente de seu tempo.
Menos o cock pit
Tá a comparar cockpits de 2020 com um de 1990???
Não lembro de ter visto uma matéria tão detalhada assim sobre este caça em português.
Parabéns ao autor e ao site por disponibilizarem esta obra prima!
construir o YF-23 ainda seria viável tecnologicamente e economicamente?
Parabéns pela matéria. Interessante seria saber porque perdeu para o f-22? Apontar os diferenciais que levaram a escolha do f-22. Como leigo me parece até um avião interessante mas prefiro o design do f-22.
Acho que a USAF teve medo… o YF-22 era uma evolução, o YF-23 uma revolução. Quiseram ir pela via segura e escolher um sucessor stealth do F-15
Apenas 3 AIM-120 e 3 AIM-9?
YF-23, o F-22 te mandou um abraço…
Sérgio Santana, parabéns pelo artigo. O YF-23 sempre foi uma curiosidade que tive, assim como o F-20. Agora ambas estão sanadas.
Mais bonito que o F-35
parabéns Sergio pela excelente matéria. comenta-se que o contrato foi dado a lockhead porque a Northtrop já tinha um contrato polpudo com o B-2 assim resolveram partir o bolo
MINUTOS PRECIOSOS NESTA LEITURA. Aplausos.
Caberia no atual cenário ressuscitar este projeto ?